好么,打脸比想象中来得快多了。
特斯拉Robotaxi上路这才两周,就被曝出发生碰撞了,对方还是一辆正在停放的车。
△图源:Dirty Tesla
有已经溃败的Cruise事故教训在前,美国网友都觉得胆寒。
特斯拉Robotaxi失败了吗?纯视觉做L4跑不通了吗?
不见得。
几乎同一时间,大洋彼岸另一边的Robotaxi玩家萝卜快跑,首次决定转换技术路线。李彦宏一锤定音,要求萝卜全面转向纯视觉:
萝卜快跑是在跟时间赛跑,要切换到纯视觉路线才有机会。
特斯拉Robotaxi上路,两周就撞了
从6月22日首次上路,至今不过两周多,特斯拉的Robotaxi就出事了。
一位名为“DirtyTesla”的博主,用视频记录了首起事故的来龙去脉。
他表示,事情发生在美国奥斯汀市的街道上,自己乘载这辆Robotaxi刚刚结束行程。
由于没有顺利进入停车场,车辆只能停在入口处,此路段不仅昏暗,还十分狭窄。
博主下车后拍到,这辆低速的Robotaxi突然自行加速并误打方向盘,轮胎剐蹭到旁边静止的丰田凯美瑞,随后亮起了警示灯。
而且从视频可以看出,车内是有一位安全员的。博主表示,最后车辆由安全员爬上主驾接管,驶离了现场。
△截图自Dirty Tesla视频
据路透社消息,视频曝光后,美国国家公路交通安全管理局(NHTSA)迅速介入了调查,要求特斯拉提交事发车辆在碰撞发生时的感知逻辑、控制决策链、异常响应机制,以及Robotaxi当前版本系统的整体运行评估框架。
虽然这次事故不算严重,也没有造成人员伤亡,但社会反响却和宣传时期一样,声势浩大。
因为特斯拉首批只投放了不超过20辆Robotaxi,又在上路短短两周就出现事故,网上还流传着不少“错误变道”、“限速超速”与“紧急刹车”等视频,让美国民众十分担心。
而特斯拉官方,到现在还没有出面解释回应,就更令网友担忧了。
毕竟美国之前还有一位L4玩家,其惨痛经验如今还历历在目——通用旗下的Cruise,当初就是因发生撞击事故而被责令停运。
尽管后来试图重启业务,最终Cruise还是被通用断供,从Robotaxi玩家行列中除名。
这些网友中,更有人质疑起特斯拉纯视觉路线的可靠性。因为视频所拍摄到的场景光线不足且狭窄,也可以说属于极端环境的一种。
拿出马斯克反复强调的“第一性原理”来说,人的眼睛不会发射激光,在这种情况下可能也会出现失误。这对于安全性要求更高的L4而言,似乎不占优势。
而且最近在奥斯汀的街头,特斯拉还被拍到大量头顶激光雷达的测试车,挺值得琢磨的。
不过,以上仅属于部分人的猜测。毕竟现在车队的规模不大,运营也才刚刚起步,还有更多维度值得考察。
拿这位拍下视频的博主来说,除了这场擦蹭外,他还谈到了他乘坐特斯拉Robotaxi的更多体验。
不足之处,博主举例了封闭式停车场接客的场景。他在如图位置打了一辆Robotaxi。当时的定位,实际和上一辆Robotaxi结束行程的定位相同。
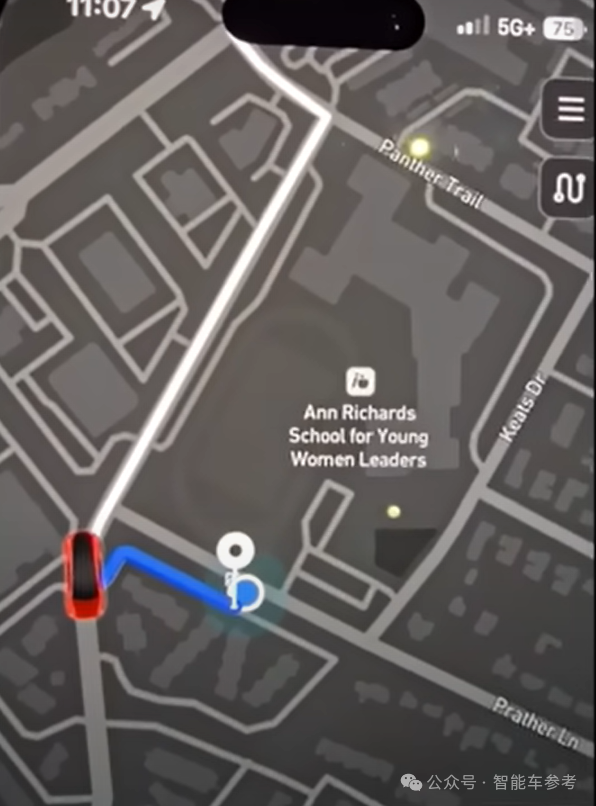
博主认为,自己选择了相同地点,Robotaxi的后台应该会有“记忆”,理解该位置可以接送乘客。
但事实是,新来的Robotaxi并没有实现这个功能,也找不到入口。博主只能看着车数次从身边经过,绕停车场转了一圈又一圈,一直等了二十多分钟。

好的方面也有,博主发现特斯拉Robotaxi在一些细节上处理得不错,包括对弱势道路使用者(指行人、骑自行车的人、骑摩托车的人等)的处理更谨慎,以及升级了FSD还没有的功能。
比如,博主发现遇到后方有救护车时,特斯拉Robotaxi会及时靠边避让。

他还举例了一个更复杂的场景,就是在堵塞的十字路口中,前方有需要等待避让的消防车,还有需要过人行道的人,后方也有行人横穿。
他发现,特斯拉Robotaxi选择了尽可能地倒车,以疏通部分道路,并保证不碰到行人。

所以,判断特斯拉Robotaxi实力究竟在哪一层,还要再看看。
至于这次的擦蹭事故,所幸没有造成实质性伤害,因此没有伤到特斯拉Robotaxi的要害,也没有撼动纯视觉路线的根基。
甚至在地球另一边,另一位Robotaxi的中国顶级玩家,也要放弃激光雷达,开始坚定纯视觉路线。
李彦宏:萝卜快跑转向纯视觉才有机会
在百度最近的季度高管会上,李彦宏做了一次“反思性”的内部演讲,复盘了很多百度业务上的得失,也推翻了之前不少观点,其中就包括Robotaxi。
提炼出关键的一点,就是萝卜快跑要改变技术路线,转向纯视觉。
在此之前,萝卜快跑和Waymo等玩家一样,也是激光雷达+视觉等多传感器融合的坚定实践者。
萝卜快跑过去的六代车型上,也都能看到传感器的身影。
这是李彦宏首次表明转向,也是萝卜快跑需要面临的重大战略转型。因为以现在的规模改变技术路线,并不是件轻松的事。
从2021年试运营到现在,萝卜快跑已经拥有超过千辆Robotaxi的运营车队。
今年年初,萝卜快跑宣布了重大里程碑——开始100%无人驾驶。到5月时,在全球已经累计提供超1100万次服务。
而且据李彦宏透露,车队现在已在武汉等城市实现了UE转正。
所谓UE(Unit Economic model),就是单位经济模型,代表公司在商业模型中收入与成本关系的最小运作单元,是衡量一家企业经营情况的重要指标。
无论放在国内还是全球,萝卜快跑如今的成绩都是Robotaxi的顶尖水平。
已经做出这样的规模,李彦宏为什么要转路线?又为什么是现在?
深扒背后的逻辑,其实和纯视觉最大的优势有关。
我们都知道,纯视觉和融合感知路线最大的不同就是硬件。无需多传感器,特别是无需激光雷达,让纯视觉的硬件成本可以极大下降。
对公司而言,这对加速车队扩张、增强盈利能力有极为明显的帮助。
李彦宏认为,如果能尽早做出规模,做出用户口碑,能够跑通的话,萝卜快跑的技术路线就有时间迭代到最终的纯视觉。
而且在他看来,萝卜快跑是在和特斯拉抢时间,情况十分紧迫:
如果我们不能迅速占领市场,迅速打磨技术,等到有一天,特斯拉这种纯视觉路线真正成熟的时候,可能我们也就没有机会了。
当然,为了确保安全性,纯视觉背后需要非常强大的数据和AI技术做支撑,而这正是百度一直在做的核心业务。
而且纯视觉对于百度来说并不陌生,百度和吉利合作打造的极越,当初就是国内最早的纯视觉玩家。
极越的纯视觉核心是 “BEV+Transformer+OCC(占用网络)”架构,依靠百度Apollo的数据闭环体系,以“周更”速度优化算法。到去年6月V1.6.0版本升级后,极越的点到点领航辅助已经支持全国300+城市的城区道路。
第二届中国智驾大赛首站北京站,极越01还在一众激光雷达选手中脱颖而出,在城市NOA赛上拿下冠军。
如果没有发生转折,那么今年辅助驾驶的竞速,极越也许仍是榜上有名。
虽然极越没讲出好的结尾,但关于纯视觉的故事,萝卜快跑不是零基础。